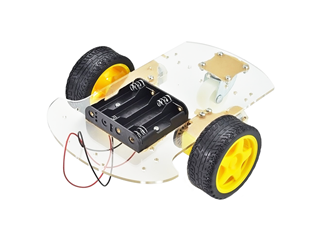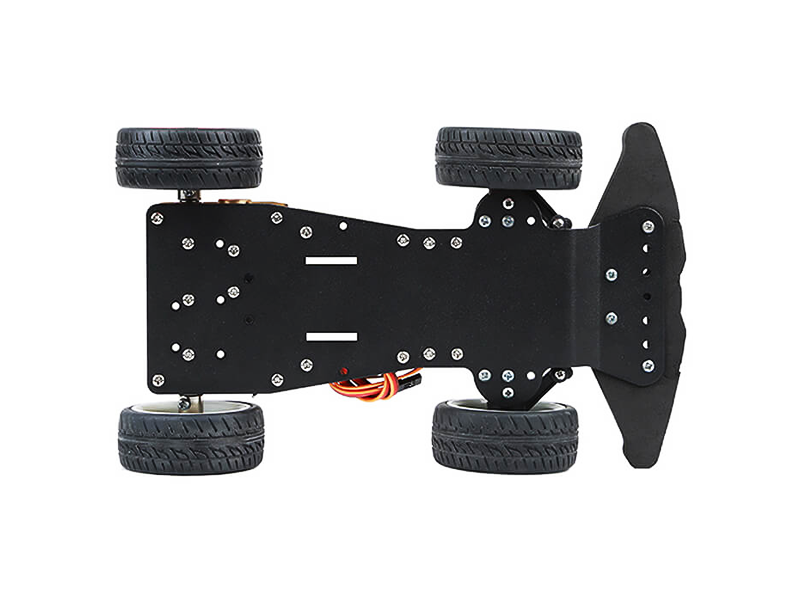

This is a newly designed 4-wheel car chassis, and ordinary 4-wheel drive is different from this car with rear-wheel drive plus front steering mechanism to achieve the car forward, backward and turn left and right.
And professional remote control racing principle, the use of two rod through the steering servo to control the direction of the car. In addition, the steering mechanism of the rear wheel has also been changed. The aluminum fixing piece is integrally formed with the motor and the motor is tightly engaged with the drive shaft. The motor adopts the all-metal gear motor. If you pursue high speed, As long as the 25mm shaft diameter motor can be. The rear wheel incorporates two flange cup bearings to ensure a more flexible motor rotation.
Because of the use of more precious metal parts (bearings, transmission gear, connecting rod, metal motor, steering cup, multi-function bracket, etc.), which is expensive, the user can compare the merits, of course, the market is also cheaper Similar to the chassis, work is not on a level of the.
We only have fixed mounting holes for arduino platform, if you are other platforms, you need to punch holes or try to install.
Specifications
Similar Products